浏览量:
发布时间:
来源地:天津市-天津市-天津港保税区
产品详情
服务评价
成交记录
详细信息:
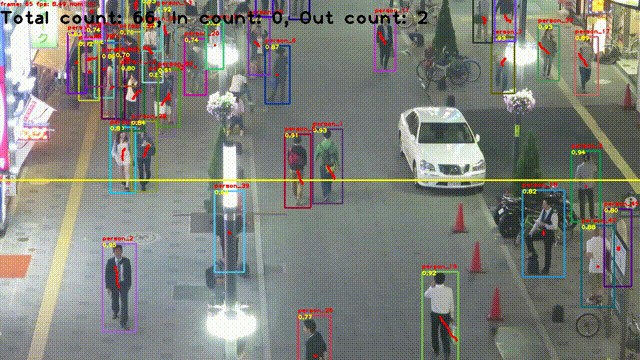
通过Kalman滤波对目标位置进行预测;将预测结果用于KCF框架,精确定位目标;根据KCF跟踪响应值判断目标是否发生遮挡。发生遮挡时,KCF的跟踪结果无效,滤波器不更新,用Kalman滤波的预测结果进行校准;未发生遮挡时,更新滤波器,同时用滤波器的跟踪结果进行Kalman校准,得到最终的目标位置。该算法在目标发生遮挡或者目标尺度发生变化的情况下可以准确跟踪目标,数据处理速度约为82帧/秒,基本可以满足实时性要求。