


详细信息:
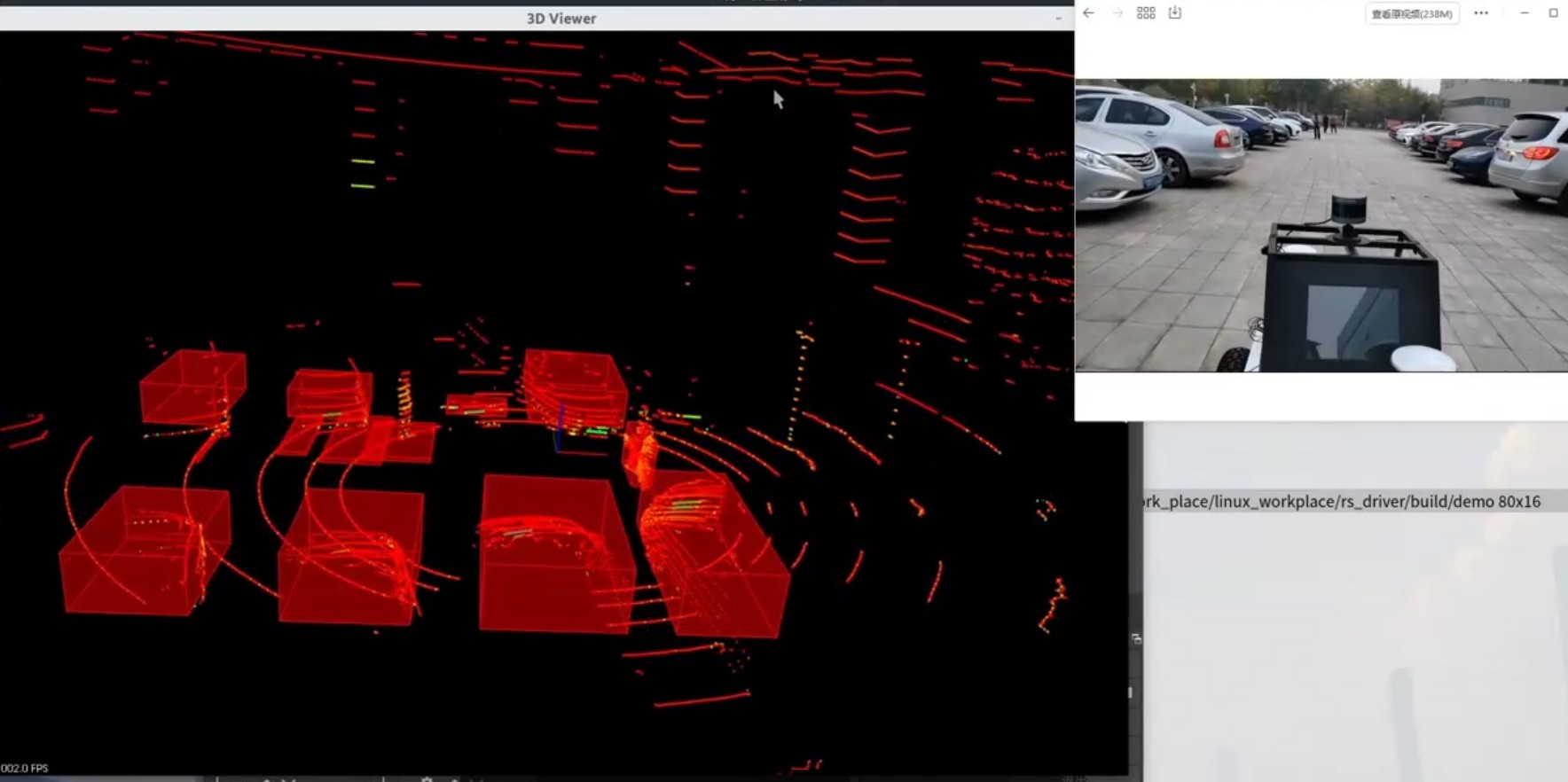
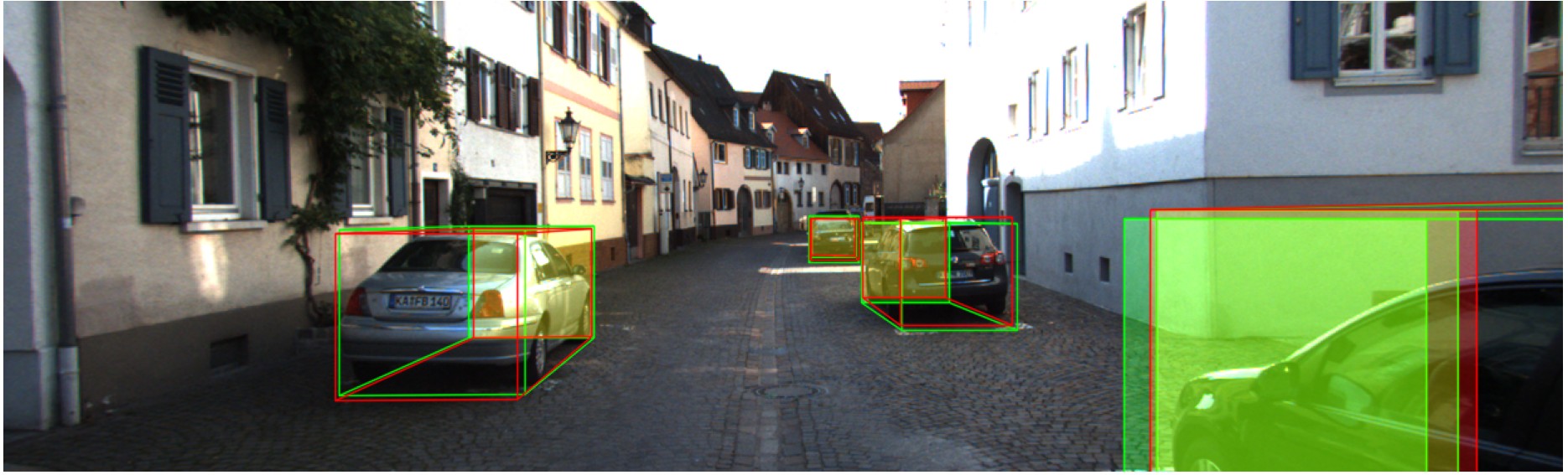
成果简介:该系统基于改进的全局通道注意力架构,提高了相机在3D空间中的多目标的检测能力。基于场景中的目标数量自适应调整跟踪算法参数,提高激光目标跟踪的鲁棒性。最后,通过对相机、激光雷达与惯性传感器等多种传感器的运行状态进行分析,自适应分配多种传感器后融合权重,提高了系统在传感器性能下降时的定位鲁棒性。
成果核心创新点:综合多种传感器模态优势,全面适应行车场景,提高检测与跟踪的准确性和鲁棒性。在传感器退化情况中也能最大程度保持系统的稳定性。
成果详细用途:系统基于真实行车数据集进行测试,相机检测准确率90%以上,单帧检测速度30ms以下、激光3D目标跟踪成功率82.65%、定位误差小于1m/km。
预期效益说明:系统已在低速园区配送车和仓储货运叉车测试平台部署,实际场景表现良好,验证了其有效性和可靠性。
成果简介:该系统基于改进的全局通道注意力架构,提高了相机在3D空间中的多目标的检测能力。基于场景中的目标数量自适应调整跟踪算法参数,提高激光目标跟踪的鲁棒性。最后,通过对相机、激光雷达与惯性传感器等多种传感器的运行状态进行分析,自适应分配多种传感器后融合权重,提高了系统在传感器性能下降时的定位鲁棒性。
成果核心创新点:综合多种传感器模态优势,全面适应行车场景,提高检测与跟踪的准确性和鲁棒性。在传感器退化情况中也能最大程度保持系统的稳定性。
成果详细用途:系统基于真实行车数据集进行测试,相机检测准确率90%以上,单帧检测速度30ms以下、激光3D目标跟踪成功率82.65%、定位误差小于1m/km。
预期效益说明:系统已在低速园区配送车和仓储货运叉车测试平台部署,实际场景表现良好,验证了其有效性和可靠性。
联系我们
李晴
更多推荐
