


详细信息:
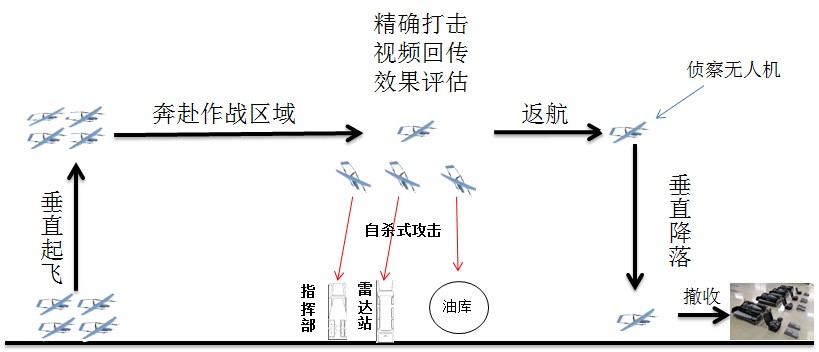
成果简介:随着无人机产业链趋于成熟,飞控与导航技术的快速发展,无人机具备了小型化、智能化、低成本的条件,还可以通过搭载不同的任务载荷,执行各种复杂的任务,如侦察、监视、通信中继、气象探测、地面搜救,资源调查等。
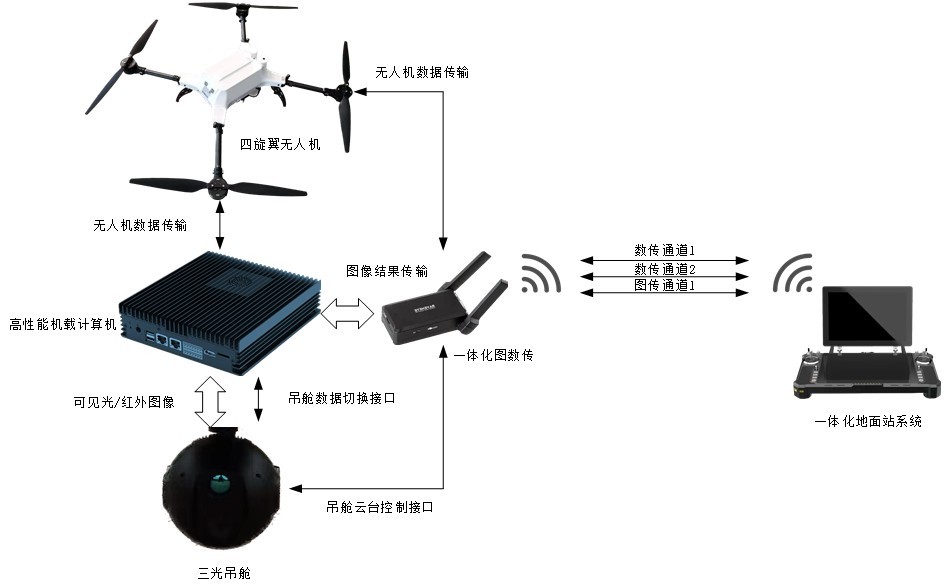
成果核心创新点:本项目开发无人智能系统主要包括有无人机平台、飞行控制系统、三光吊舱系统、地面控制系统、配置电动无刷电机,链路丢失返航功能,供电续航、电子地图等的无人智能系统,飞行器适用于完成较大载重载荷设备挂载飞行,在智能飞行驾驶仪控制下完成自主起飞、空中巡航、起飞点自主降落、操作人员在便携式地面站上实时监控飞机飞行状态,完成不同载荷对应的飞行任务。
成果详细用途:利用高效的磁场共振技术,实现电能的无线传输,飞行器可以自动停靠在无线充电站点,高效的磁场共振技术实现快速充电,增加续航能力。
预期效益说明:本团队已具备无人机远程智能检测、供电组网等核心零部件生产能力,目前完成无人机机械臂,无人机机械手柄设计等开发,无人机电力巡检,无人机载伤员无人机载伤员搜索与伤情评估系统等项目,
成果简介:随着无人机产业链趋于成熟,飞控与导航技术的快速发展,无人机具备了小型化、智能化、低成本的条件,还可以通过搭载不同的任务载荷,执行各种复杂的任务,如侦察、监视、通信中继、气象探测、地面搜救,资源调查等。
成果核心创新点:本项目开发无人智能系统主要包括有无人机平台、飞行控制系统、三光吊舱系统、地面控制系统、配置电动无刷电机,链路丢失返航功能,供电续航、电子地图等的无人智能系统,飞行器适用于完成较大载重载荷设备挂载飞行,在智能飞行驾驶仪控制下完成自主起飞、空中巡航、起飞点自主降落、操作人员在便携式地面站上实时监控飞机飞行状态,完成不同载荷对应的飞行任务。
成果详细用途:利用高效的磁场共振技术,实现电能的无线传输,飞行器可以自动停靠在无线充电站点,高效的磁场共振技术实现快速充电,增加续航能力。
预期效益说明:本团队已具备无人机远程智能检测、供电组网等核心零部件生产能力,目前完成无人机机械臂,无人机机械手柄设计等开发,无人机电力巡检,无人机载伤员无人机载伤员搜索与伤情评估系统等项目,
联系我们
李晴
更多推荐
